Canada will play a major role in future surface exploration missions to the Moon. A key area of expertise in Canada is robotics and surface mobility systems. Mobility is critical for enabling robotic and human exploration of the Moon and it is the hope of the Canadian Space Agency (CSA), that Canada will contribute such systems to the international exploration effort. In 2019, Canada announced its participation in the NASA Artemis initiative, by initiating the development of the Canadarm-3 for the Lunar Gateway, and providing artificial-intelligence software and programming to self-operate systems and Canadarm-3 on the Lunar Gateway.
Artist rendition of the Canadarm-3 that the Canadian Space Agency will supply to NASA for the Artemis Lunar Gateway.
To this end, the CLRN is interested in robotics both for pre-cursor lunar missions as well as for use during human exploration. The team involves both scientists and engineers in order to ensure appropriate technologies are developed. At UTIAS (University of Toronto Institute for Aerospace Studies; often in partnership with MDA and CSA), work is ongoing to develop and field test key technologies for planetary rovers including: global self-localization appropriate to the lunar environment, visual odometry to estimate relative motion, visual homing to support sample return missions and Extravehicular Activity (EVA) rescue, autonomous terrain assessment and path-planning for extreme terrain, and autonomous three-dimensional site mapping/localization for lunar worksite environments. Planned future work will include autonomous instrument deployment / site surveying, regolith sampling, and site preparation / excavation. These are some of the key technologies needed to enable lunar surface exploration and there are many others. The establishment of an LSI node will help to inform the selection of technologies develop by Canadian robotics researchers.
A number of CLRN researchers have significant expertise in mobile robots, tele-robotics, and mechatronic system designs, which will be directed at developing specialized robotic and other mechatronic systems that would be suitable for lunar exploration and collection and handling of lunar samples.
Dr. Barfoot at the University of Toronto, and Dr. Osinski at the University of Western Ontario are involved in several ongoing concept studies being led by MDA and funded by the CSA for robotic and human mobility systems. This team of researchers is also working towards conducting science-driven robotic exploration missions at planetary analogue sites. These missions will help gather useful science, test robotic technologies, and help establish mission scenarios. A lead-in visit to Devon Island involving several CLRN members occurred in the summer of 2008.

ROC6 Rover collecting ground-penetrating radar data at Devon Island, Canada.
MDA Lunar Rover Concept Study
In 2021, MDA was awarded an initial design phase contract by the CSA to design a Canadian Lunar Rover mission with the goal to conduct a mission at the South Pole of the Moon to search for volatiles and water-ice deposits in the permanently shadowed regions. MDA recruited scientists, engineers, and software developers from across Canada to deliver the Lunar Exploration and Accelerator Program (LEAP) Lunar Rover, demonstrating Canada’s ability to design, develop, and test robotic technology for lunar surface exploration. The team comprises of three parts:
1. Technology
Mission Control Space Services,
Centre de Technologies Avancées BRP-UdeS (CTA),
Institut national d’optique (INO), Clearpath Robotics, Kepler Communications, Xiphos Systems Corporation, Delton Innovations Ltd, NASA Ames Research Center, UTIAS, and Carleton University.
2. Science
York University, Western University, Concordia University, University of Hawaii, Stoney Brook University, Ingenium Canada’s Museums of Science and Innovation, and the Natural History Museum.
3. Public Outreach, Education and Engagement
Felix & Paul Studios, and Mission Control Space Services.

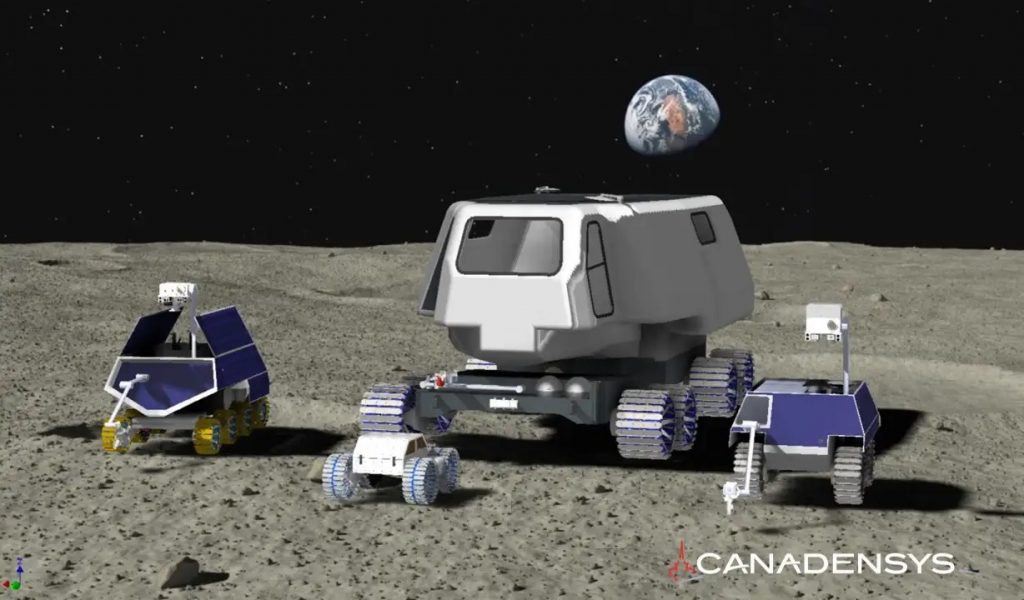
Canadensys Lunar Rover Award
Most recent announcements on Canadian lunar rover concept studies is the contract that was awarded to the Canadensys Aerospace Corporation by the CSA in June 2022. Through this contract, Canadensys will develop a concept for the Autonomous & Intelligent Robots & Rovers elements of Canada’s Lunar Surface Exploration Initiative. Canadensys was selected for this contract because the corporation brings forward substantial experience in rover autonomy, robotic tools, docking & berthing mechanism, autonomous awareness (self-aware software), and navigation & hazard avoidance systems.