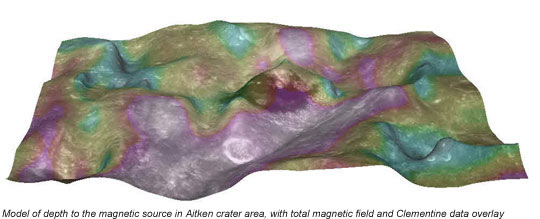
CLRN researchers make use of a variety of remote sensing data sets, including those from Apollo-era missions, to the most recent spacecraft data, as well as earth-based observations, for science and exploration planning. Data fusion and Geographic Information System (GIS) techniques allow for the analysis of multiple lunar data sets in order to produce synergistic analyses for geology, geophysics and mission planning. For example, Dr. Antonenko, Magnetic Data Specialist at SBQuantum, and her co-workers have fused Lunar Prospector Magnetic data, Clementine UVVIS data, and Apollo Lunar Sounder data from Aitken Crater in order to obtain new insights into the stratigraphy in this region. Apart from older Lunar Orbiter, Apollo, Clementine, and India’s Chandrayaan-1 images, new data from JAXA’s Kaguya and NASA’s Lunar Reconnaissance Orbiter mission will soon be available to add to their analyses.
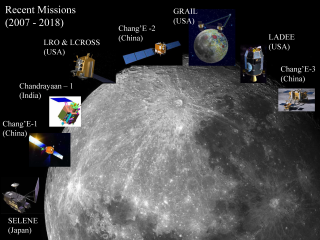
Summary of lunar spacecraft missions that use remote sensing instruments to analyze the surface of the Moon.
CLRN’s remote sensing research builds upon terrestrial and industrial applications of remote sensing and GIS; planetary scientists are now beginning to use GIS extensively for science and mission planning. Advances in image processing methods can also be incorporated, including resolution maximization algorithms (super-resolution), which use repeat coverage of an area to improve spatial resolution. CLRN members will apply these algorithms to lunar and planetary data in order to make the best use of all our resources.
Dr. Stooke at the University of Western Ontario has completed extensive studies on the past site selection procedures, and has been contributing to future missions in this area. Dr. Stooke’s recent work includes seeking the location of the Soviet rover Lunokhod 1 precisely by matching the pattern of craters mapped by the Soviets along the Lunokhod route with craters seen in orbital images (Clementine UV-VIS (Ultraviolet-visible) and LWIR (long-wavelength infrared) data, Apollo 15 oblique Hasselblad frames, and Lunar Orbiter 4 images). This enables laser ranging of the Lunokhod craft for the first time since 1970. Dr. Stooke is also working to locate and study artificial impact craters made by Apollo-era and later spacecraft. Currently, of 4 Apollo LM ascent stages impacted on the Moon, only one has been located precisely, and of 5 Saturn IVB upper stage impacts, only 2 locations are known precisely. In addition, the Rangers, Hiten and SMART-1 impact sites are also not known precisely. The unknown impacts will be sought, and ejecta of all the impact sites will be examined in LROC images and characterized. The ray patterns will be mapped in various data sets (Lunar Orbiter, Apollo, Clementine UV-VIS and LWIR, Kaguya, and LRO) to estimate the horizontal extent, providing an estimate of the energy imparted to ejecta at varying velocities and impact angles. Previous data have revealed that some artificial impact ejecta deposits show unusual dark rays, while others appear bright. With a larger sample, comparisons between visible and IR data, as well as lighting and viewing geometry, may help explain this difference. This work may help interpret results from the upcoming LCROSS mission.